The International Conference on Computer Vision (ICCV) 2025
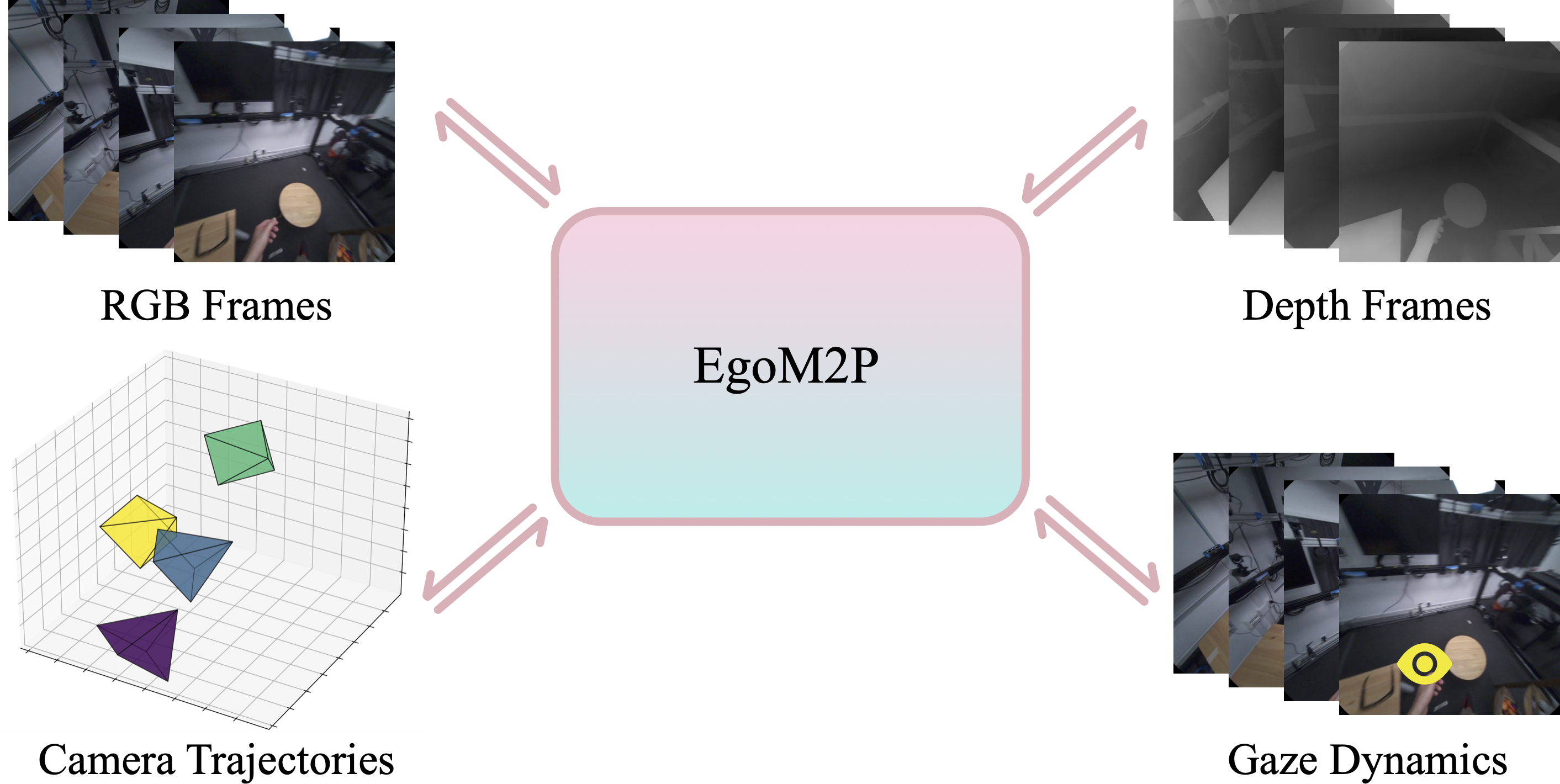
EgoM2P: A large-scale egocentric multimodal and multitask model, pretrained on eight extensive egocentric datasets. It incorporates four modalities—RGB and depth video, gaze dynamics, and camera trajectories—to handle challenging tasks like monocular egocentric depth estimation, camera tracking, gaze estimation, and conditional egocentric video synthesis. For simplicity, we only visualize four frames here.
Abstract
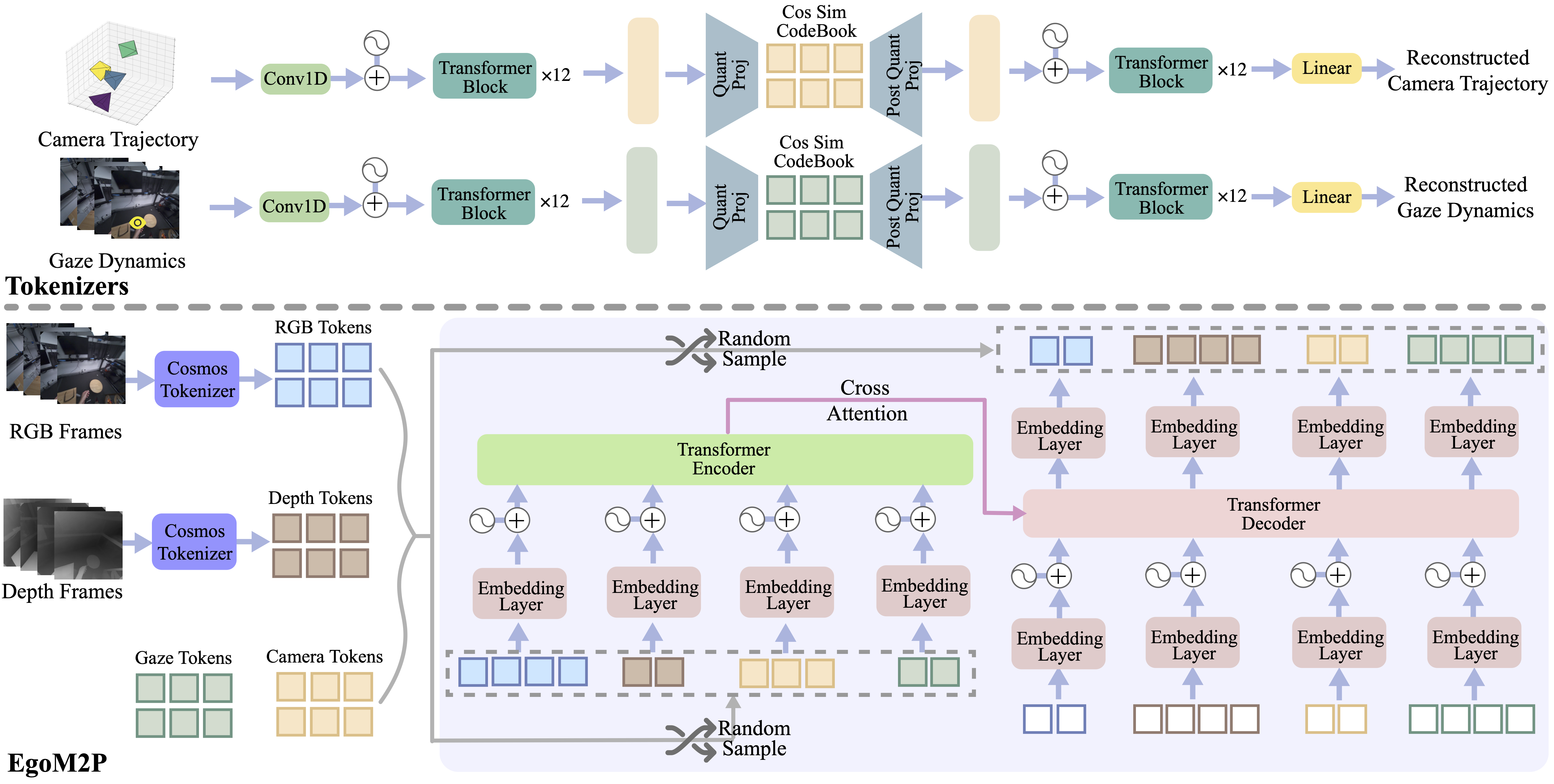
Understanding multimodal signals in egocentric vision, such as RGB video, depth, camera poses, and gaze, is essential for applications in augmented reality, robotics, and human-computer interaction, enabling systems to better interpret the camera wearer’s actions, intentions, and surrounding environment. However, building large-scale egocentric multimodal and multitask models presents unique challenges. Egocentric data are inherently heterogeneous, with large variations in modality coverage across devices and settings. Generating pseudo-labels for missing modalities, such as gaze or head-mounted camera trajectories, is often infeasible, making standard supervised learning approaches difficult to scale. Furthermore, dynamic camera motion and the complex temporal and spatial structure of first-person video pose additional challenges for the direct application of existing multimodal foundation models. To address these challenges, we introduce a set of efficient temporal tokenizers and propose EgoM2P, a masked modeling framework that learns from temporally-aware multimodal tokens to train a large, general-purpose model for egocentric 4D understanding. This unified design supports multitasking across diverse egocentric perception and synthesis tasks, including gaze prediction, egocentric camera tracking, and monocular depth estimation from egocentric video, and also serves as a generative model for conditional egocentric video synthesis. Across these tasks, EgoM2P matches or outperforms specialist models while being an order of magnitude faster. We will fully open-source EgoM2P to support the community and advance egocentric vision research.
Abstract
Understanding multimodal signals in egocentric vision, such as RGB video, depth, camera poses, and gaze, is essential for applications in augmented reality, robotics, and human-computer interaction, enabling systems to better interpret the camera wearer’s actions, intentions, and surrounding environment. However, building large-scale egocentric multimodal and multitask models presents unique challenges. Egocentric data are inherently heterogeneous, with large variations in modality coverage across devices and settings. Generating pseudo-labels for missing modalities, such as gaze or head-mounted camera trajectories, is often infeasible, making standard supervised learning approaches difficult to scale. Furthermore, dynamic camera motion and the complex temporal and spatial structure of first-person video pose additional challenges for the direct application of existing multimodal foundation models. To address these challenges, we introduce a set of efficient temporal tokenizers and propose EgoM2P, a masked modeling framework that learns from temporally-aware multimodal tokens to train a large, general-purpose model for egocentric 4D understanding. This unified design supports multitasking across diverse egocentric perception and synthesis tasks, including gaze prediction, egocentric camera tracking, and monocular depth estimation from egocentric video, and also serves as a generative model for conditional egocentric video synthesis. Across these tasks, EgoM2P matches or outperforms specialist models while being an order of magnitude faster. We will fully open-source EgoM2P to support the community and advance egocentric vision research.
Method
Pretraining